Chang’e 3

Chang’e 3 lander on lunar surface (Credit: CNSA)
Other name: CE-3. Type: Robotic lunar landing. Programme: CLEP. Agency: CNSA/SASTIND. Spacecraft family: Chang’e 3. Orbit: Lunar. Mass (gross): 3,800 kg. Launch site: Xichang. Launch complex: LC2. Launch vehicle: CZ-3B. Launch date: 2013-12-02. Lift-off time: 01:30 CST. Lunar landing: 2012-12-24 21:11 CST. Ending: n/a. Duration: On-going.
The second phase of the China Lunar Exploration Programme (CLEP) saw a robotic probe Chang’e 3 soft-landing on the Moon, the first in nearly three decades since the Soviet Union’s Luna 24 mission in 1976. The Chang’e 3 mission was designed to demonstrate and perfect a range of new technologies, including lunar soft-landing, lunar surface exploring, lunar-night survival, and deep-space communications, which are critical for subsequent lunar exploration missions. Its primary goal was to soft-land the unmanned spacecraft on the Moon, and to deploy a lunar rover to inspect the areas surrounding the landing spot.
The Spacecraft
Chang’e 3 consisted of two parts: the lunar landing vehicle (known as the “Lander”) and the lunar surface exploring vehicle (known as the “Rover”). The Lander had a dry mass of 1,200 kg, and weighted 3,700—3,780 kg when fully loaded. It had four landing legs with a span of 4.76 m. The vehicle’s body is 0.83 m above the ground when standing on the surface. The Lander consisted of 11 sub-systems, including space frame, impact absorbing, GNC, propulsion, thermal control, telemetry and communications, steerable antenna, data management, battery, electric, and mission payloads.
Scientific instruments carried onboard the vehicle included landing camera, terrain camera, lunar-based ultraviolet telescope, and extreme-ultraviolet (EUV) camera. Engineering payload included lunar dust monitoring sensor and surveillance camera. The onboard electric and electronics sub-systems were similar to those of the predecessors, but have been optimised for better integration and lighter weight.
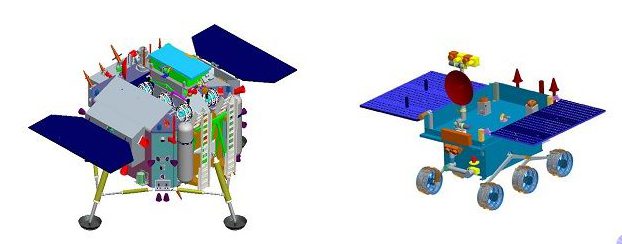
Chang’e 3 lander and Yutu Rover
The spacecraft’s telemetry and communication system worked in both S-band (for the conventional TT&C) and X-band (for the deep space TT&C). The Lander and the Rover communicated with each other via an UHF data link. In addition to its solar panels, Chang’e 3 was the first Chinese spacecraft to have been fitted with a radioisotope heater unit (RHU), a small nuclear battery device using plutonium-238 to provide heat through radioactive decay to power the Lander’s sub-systems during the 14-day lunar night.
To ensure a successful and precision soft-landing on the lunar surface, the Lander also featured an autonomous landing navigation system, which was designed to measure the craft’s distance and velocity relative to the Moon. The system also possessed certain terrain recognition and autonomous terrain avoidance capabilities to guide the Lander during the landing descent, without the requirement for interference from the Mission Control on Earth.
Development of Chang’e 3 began in 2012. To fully test the spacecraft throughout all phases of the mission, in addition to conventional thermal vacuum chamber tests, the spacecraft prototype was put through tests in ground lunar simulation facilities, which were designed to emulate the 1/6 g gravity and harsh lunar surface environment. These included a lunar landing simulation facility for the Lander, and indoor and outdoor lunar surface simulation facilities for the Rover.
Mission Profile
Chang’e 3 was launched atop a Chang Zheng-3B (CZ-3B) launch vehicle on 2 December 2013, at 01:30 local time from Launch Complex 2 at the Xichang Satellite Launch Centre.
On 6 December at 17:53 Beijing Time, the spacecraft fired its main engine for breaking. After a retrofire burn that lasted for 361 seconds, the spacecraft settled in a 100 km circular lunar orbit.
On 10 December at 21:20 Beijing Time, the spacecraft fired its engine again to enter a 100 x 15 km, 45° inclined elliptic orbit.
On 14 December, the spacecraft ignited its 7,500 N variable thruster main engine at the point of the 15 km perigee to further reduce its velocity, so that it slowly descended to a 100 m altitude above the Moon surface. The Lander hovered at this altitude, moving horizontally under its own guidance to avoid obstacles, and then slowly descended to 4 m above the lunar surface, at which point its engine was shut down for a free-fall onto the lunar surface. The touchdown occurred at 21:11 Beijing Time (13:11 GMT).
Five locations have been considered for Chang’e 3’s landing spot, including Sinus Iridum, Mare Nectaris, Mare Humorum, Kepler crater, and Aristillus crater, with Sinus Iridum being the first choice. High-definition images of the area were captured by the Chang’e 2 lunar orbiter in 2010. However, the Lander actually descended to Mare Imbrium, about 40 km south of the 6 km diameter Laplace F crater, at 44.1214°N, 19.5116°W (2,640 m elevation).
On 15 December at 04:35 Beijing Time, the Lunar Rover Yutu was successfully deployed from the Lander to start its three-month lunar surface inspection mission. On 15 January 2014, the control of the Chang’e 3 mission was handed over from the Main Control Hall at the Beijing Aerospace Control Centre to its long-term mission control room.






Yutu Rover
The Automatic Lunar Surface Exploring Vehicle (自动月面巡视器), commonly known as “Lunar Rover” (月球车), is a solar-powered, wheeled robotic vehicle that can propel itself across the lunar surface after landing. The Lunar Rover carried by Chang’e 3 was named Yutu (“Jade Rabbit”), also from ancient Chinese mythology.
Designed and built by China Academy of Space Technology (CAST), the six-wheeled lunar rover has a designed life of 90 lunar days, and can explore an area of 3 square kilometres, with a maximum travelling distance of 10 km. It has a total mass of 120 kg and can carry up to 20 kg payload. The vehicle is capable of autonomously navigating around, avoiding obstacles, selecting the most optimised routes and locations for exploration activities.
Onboard instruments included a stereo camera, a lunar-ground penetrating radar, an infrared spectrometer, and an X-ray spectrometer. A mechanical collector designed by the Hong Kong Polytechnic University allowed the vehicle to collect lunar soil samples for analysis. All systems were powered by two solar panels for operations during lunar-days and several radioisotope heater units (RHUs) for heating the onboard equipment during lunar-nights.
Yutu went into sleep mode on 11 January 2014 under the command of mission control to ensure its first lunar night. When mission control attempted to wake it on 25 January, the vehicle failed to respond properly to commands from Earth. It was reported that the vehicle suffered from a control circuit malfunction in its driving unit, which prevented the vehicle from moving or folding its mast and solar panels in preparation for the upcoming lunar-night.
Yutu failed to transmit any signal after the second lunar-night on 12 February 2014, was declared inoperative. However, one day later the vehicle re-established communication with mission control. Chinese space engineers admitted that the vehicle’s control circuit had completely failed, resulting in the vehicle remaining immobile. Although the vehicle’s onboard scientific instruments were still functioning, its inability to fold its mast and solar panels into an insulating position during lunar-night have caused these instruments to degrade rapidly. Mission control planned to continue operating the crippled vehicle until it stops working completely.
